Az 1950-es és 60-as években a General Electric (GE) meglepő módon a robotika kulcsszereplőjévé vált, és az amerikai hadsereggel együttműködve fejlesztett ki különböző robotrendszereket. Az egyik korai újításuk a Handyman volt – ez még nem egy jármű, hanem egy robotmanipulátor, szép magyarosan: egy robotkar, amelyet 1958-ban készítettek a GE mérnöke, Ralph Mosher irányítása alatt. A készülék egy hordható vezérlő hevederrel volt irányítható, amely közvetlenül továbbította az operátor mozdulatait a robotkarhoz, így azok ugyanazokat a mozdulatokat végezték el, mint az emberi kezek. Az operátor tehát nem közvetlenül a robotkart irányította, hanem a heveder viselésével a saját mozdulatait használta a vezérlésre. Ez a rendszer különösen alkalmassá tette a robotkart finom, törékeny vagy radioaktív anyagok kezelésére, mivel az operátor anélkül tudta végrehajtani a feladatokat, hogy közvetlenül érintkezne ezekkel az anyagokkal.

Mosher elképzelése szerint a Handyman technológiája sokféle környezetben lett volna alkalmazható, beleértve a világűrt, a víz alatti és az ipari környezetet.
A Handyman után a GE 1968-ban bemutatta a Hardimant. Ez egy hordozható exoskeleton volt, amelyet “embererősítő eszköznek” neveztek, és szintén a mozdulatok továbbításával tette lehetővé a viselők számára, hogy több mint 635 kilogrammot felemeljenek. Sajnos a Hardiman jelentős súlya (680 kilogramm) és stabilitási problémái megakadályozták, hogy tömeggyártásba kerüljön.

Ahogy látjuk ezek az eszközök a maguk (mai szemmel nézve) retrofuturista megjelenésükkel, valamint mostanra megmosolyogtató technooptimista elnevezéseikkel, mintha egyenesen a Fallout játékok világából csöppentek volna ide – és ez nem véletlen, mivel jó eséllyel mindez komoly inspirációs forrás volt a játék alkotói számára.
A következő lépés azonban a korábbiaknál is ambiciózusabb volt, és a GE nagyon sokat várt tőle: a GE hadianyag-osztálya (Pittsfield) ugyanis úgy tekintett a Pedipulatorra, amivel komoly összegeket lehetne behúzni a hidegháborús védelmi finanszírozásból. A pedipulátort kezdetben ugyan az űrhajósok holdi szállítóeszközének tervezték, de ez az elképzelések szerint hasznos lett volna Vietnam dzsungeles, nehezen autózható vidékein is. A Pedipulator több tervezési iteráción esett át: a korai modellek nehézkes, gólyalábakon botladoztak, így a későbbi tervek a stabilizációra helyezték a hangsúlyt. A GE pedig a fejlesztés során lelkesen reklámozta az eszközt, ahol csak tudta:
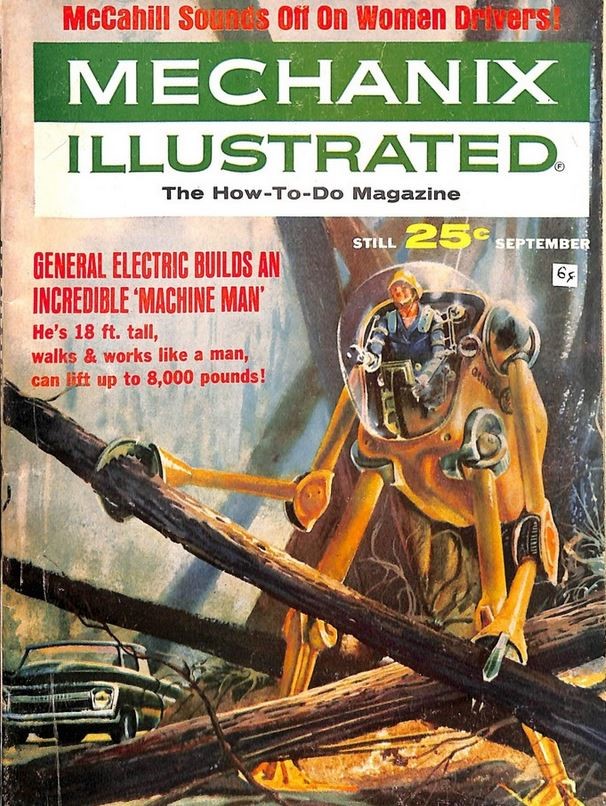
A Pedipulator azonban a tervezés minden fázisában jelentős gyakorlati kihívásokkal nézett szembe. A magas súlypont miatti stabilitási problémákat sosem sikerült igazán megoldani, ahogy a mozgások összehangolása is túl bonyolult volt – ne feledjük ekkor nem létezett még olyan számítógép, amely a működtetés nehézségeinek leaglább egy részét levette volna a személyzet válláról. James R. Berry beszámolója a Popular Science-ben ennek megfelelően nem sikerült túl lelkesre, miután kipróbálhatta egy félkész gép kezelését.
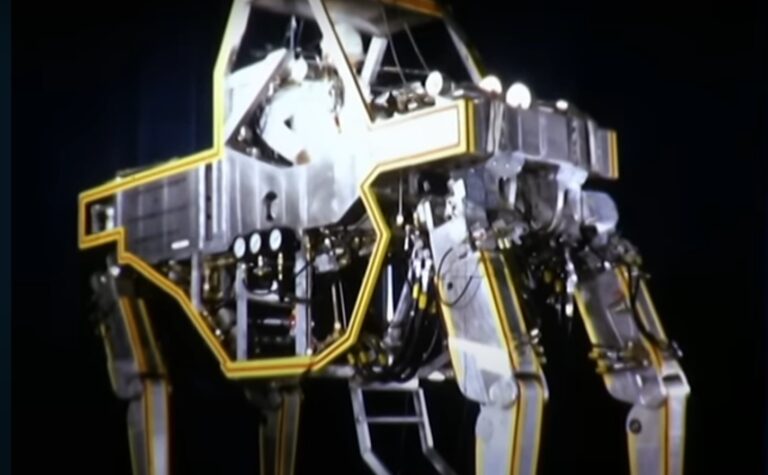
Végül a hadsereg kukázta a Pedipulator projektet éppen amiatt, hogy hajlamos a felborulásra és a kivitelezése sem túl praktikus. A GE azonban kitartott a hasonló technológiák mellett, ami 1969-ben a “Walking Truck” megalkotásához vezetett. Ez a gép robusztusabb kialakítású volt, hidraulikus megoldással és 90 lóerős benzinmotorral – illetve kettő helyett négy lábat kapott.
A 3,35 méter magas négylábú szerkezet, amelyet a katonák felszerelésének nehéz terepen való szállítására terveztek, akár 227 kilogrammot is képes volt szállítani és 454 kilogrammot arrébb tolni. A Walking Truckot egyetlen operátor működtette, és tényleg képes volt átjutni az akadályokon, de hátránya volt a lassú sebesség (6,4 km/óra) és, hogy a hidraulikus rendszernek percenként 190 liter olajat kellett keringtetnie.

Végül azonban csak egyetlen Walking Truck prototípus készült el, amely most a virginiai Fort Eustisben található amerikai hadsereg közlekedési múzeumában látható. A katonaság csalódása ezekben a projektekben a GE ambiciózus robotikai törekvéseinek végét jelentette, és Mosher végül kilépett a GE-től, és megalapította a saját cégét, a Robotics, Inc.-t, amely ipari manipulátorokra összpontosított.
Mivel ezen eszközök esetén az egyik legszűkebb keresztmetszet a nehézkes és bonyolult irányítás volt, kérdés, hogy hasonló robotok készülhetnének-e ma, most hogy a mesterséges intelligencia képes lenne a mozgatással kapcsolatos számtalan nehézséget átvenni? Vagy előbb lesz emberszabású háztartási robotunk, mint Metal Gearünk?
(Forrás: Cybernetic Zoo, Black Gate, Business Insider, képek: The Museum of Science and Innovation, Wikipedia)
Itt állíthatod be, hogy a Rakéta az elsők között legyen a Google keresőben
