Csak egy órára volt szüksége a robotkutyának, hogy megtanítsa magát járni
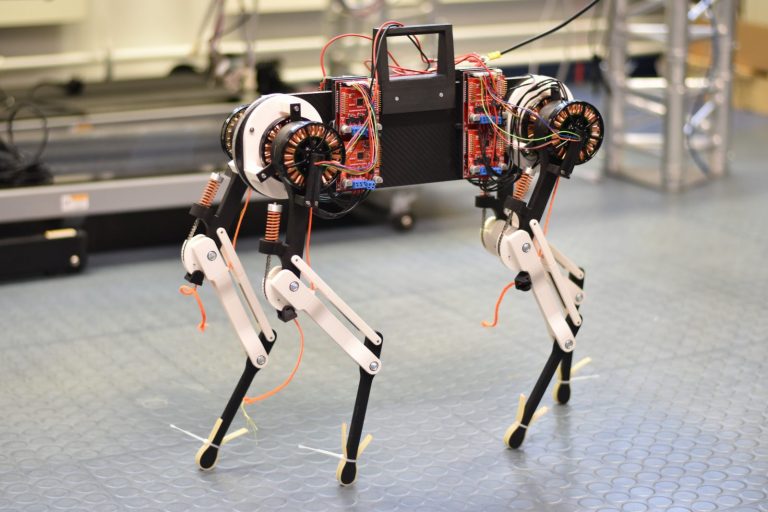
Ahogy az újszülött kisállatok, úgy a Max Planck Intézet Intelligens Rendszerek részlegének (MPI-IS) tesztelési célokra épített robotja, Morti is csak a megfigyeléseire és saját magáról való nagyon korlátozott tudására támaszkodott, mikor járni tanult, ennek ellenére egy óra leforgása alatt sikerült megoldania a feladatot. A kutatók a négylábú, kutya méretű gép létrehozásával azt próbálták meg kideríteni, hogy mennyire tud hatékonyan működni az a fajta tanulási metódus, aminek során az alany a hibáiból tanul és így érti meg, milyen változtatásokra van szükség a siker eléréséhez, ezért döntöttek az állatvilágban használt módszerek utánzása mellett, ami segít a kis zsiráfoknak és egyéb potenciális prédaállatoknak abban, hogy minél gyorsabban lábra tudjanak állni és adott esetben elmenekülni a veszély közeléből.
Mortinak a felépítése is az élőlényekét modellezi: a lábában lévő szenzorok folyamatosan információt küldenek a központi számítógépnek, ami az adatokat egy virtuális gerincoszlop adataival összehasonlítva hozza meg a döntéseket a reakciókat és irányítást illetően. A gépben a Központi Minta Generátor felel meg az élőlények (állatok és emberek) központi idegi hálózatának, ami az izmokat automatikusan mozgatja olyan egyszerű folyamatok, mint a séta vagy pislogás közben, azonban, ha a robot (akárcsak az élőlények) valamilyen nem várt akadállyal találkozik, például elesik a talaj egyenetlenségei miatt, már nem elegendő erre az automatizmusra hagyatkoznia, hanem életbe lépnek a reflexei is, többször ismétlődő bukdácsolás esetén pedig új mintát kell találnia a mozgás elvégzéséhez. Ezeket a tanulási metódusokat kellett a robot algoritmusainak is elsajátítania, aminek sikerült is gyorsan optimalizálnia a járását.
"A robotunk lényegében úgy "született", hogy semmit sem tudott a lábai anatómiájáról vagy arról, hogy hogyan működnek"
- mondta el Felix Ruppert, a Dynamic Locomotion kutatója, hozzátéve, hogy emiatt a bukdácsolás monitorozása szerves és fontos része a folyamatnak.
A robot azonban nem öncélú okokból tanult meg ilyen rekordsebességgel járni és nem is kifejezetten azért, hogy a robotkutyák evolúciójának fejlődését segítse, sokkal inkább azért, hogy a biológiával kapcsolatos még megválaszolatlan kérdéseket segítsen tisztázni olyan területeken, amelyek nehezen tanulmányozhatóak az ilyen
típusú modellezések nélkül.
(Fotó: Felix Ruppert /Dynamic Locomotion Group)