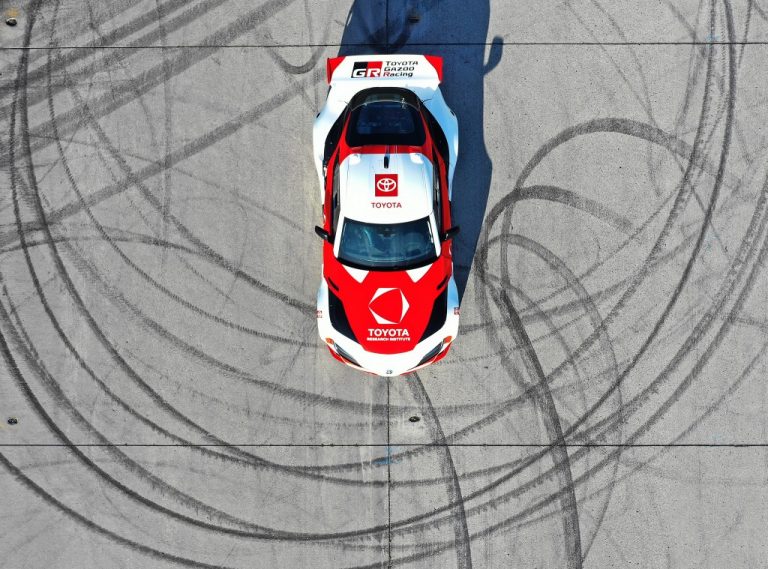
A Toyota Research Institute (TRI) szakértői Kenshiro "Ken" Gushi Formula Drift bajnok segítségével azon dolgoznak, hogy a driftelés bonyolult képességére is megtanítsák az önvezető autóikat, hogy azok ne csak egyenesben, jól ismert közlekedési szituációkban állják meg a helyüket, hanem nehéz körülmények között is rendelkezzenek egy extra biztonsági képességgel, amivel kivédhetik például a csúszós utak jelentette kockázatokat. A speciálisan erre a célra felszerelt Toyota Supra, amit a teszteléshez használtak, a Formula Drift bajnokságokon induló járművekhez hasonlóan lett felépítve, de a cél, hogy a szoftver fejlesztésével az átlagos autonóm autók is alkalmassá váljanak a manőver kivitelezésére, ha a szükség úgy hozza.
"Vizes vagy csúszós úttal szembesülve egy professzionális sofőr esetleg úgy dönt, hogy inkább driftel a kanyarban, de a legtöbben nem vagyunk professzionális sofőrök."
- mondta Jonathan Goh, a TRI kutatója - "A TRI ezért programozza ezeket a járműveket arra, hogy felismerjék az akadályokat és automatikusan drifteljenek az akadály körül egy zárt pályán."
A manőverhez használt technológia az NMPC (Nonlinear Model Predictive Control), vagy dinamikus kontroll, ami lehetőséget ad rá, hogy váratlan helyzetekben is, amennyire lehet, biztonságosan reagáljon a jármű a felbukkanó akadályokra, kiterjesztve a kontrollt olyan komplex szituációkra is, amivel valós esetekben gyakran találkozhatnak az emberek, de a jelenlegi önvezető rendszerek nincsenek rá kellőképpen felkészítve. Az önvezető driftelési funkció bekapcsolásával az autó vezetőjének nem kellene megtanulnia a manővert, a jármű magától választhatná ezt az opciót, így "a hétköznapi sofőrök számára egy professzionális versenyautó sofőr reflexeit adnánk" - írja a Toyota.
A tesztet a kaliforniai Thunderhill Raceway Park komplexum egyik pályáján végezték el, a későbbiekben pedig további technológiák kutatását tervezi a TRI, amelyek a balesetek számát csökkentő aktív biztonsági funkciók alapjául szolgálhatnak.
(Fotó: Toyota)
Itt állíthatod be, hogy a Rakéta az elsők között legyen a Google keresőben