Megérkezett a mennyezeten szaladgáló robotkutya, ami dacol a gravitációval
A Koreai Fejlett Tudományi és Műszaki Intézet (KAIST) mérnökei olyan robotkutyát hoztak létre, ami akár egy sci-fiből is jöhetett volna:
a gép számára nem okoz nehézséget falakra mászni és a mennyezeten sétálgatni és közben még terhet is cipelhet magával.
A MARVEL (magnetically adhesive robot for versatile and expeditious locomotion) elnevezésű robot egyszerű módszerrel valósítja meg a Spot, Vision 60 és más robotkutyák számára egyelőre elérhetetlen célt, a talpai ugyanis mágneseket tartalmaznak, amelyek ki és bekapcsolásával képes haladni és megtartani magát vertikálisan vagy akár fejjel lefelé is. Az EPM (elektro permanent magnet) típusú eszközök, amelyek az állandó mágnesek egyik fajtáját képviselik, áram hatására váltanak állapotot és így lépésenként képes a gép előrehaladni - egy-két lábát átmenetileg demagmetizálja, miközben többi lábával elég erősen tud kapaszkodni ahhoz, hogy dacoljon a gravitációval és ne essen le.
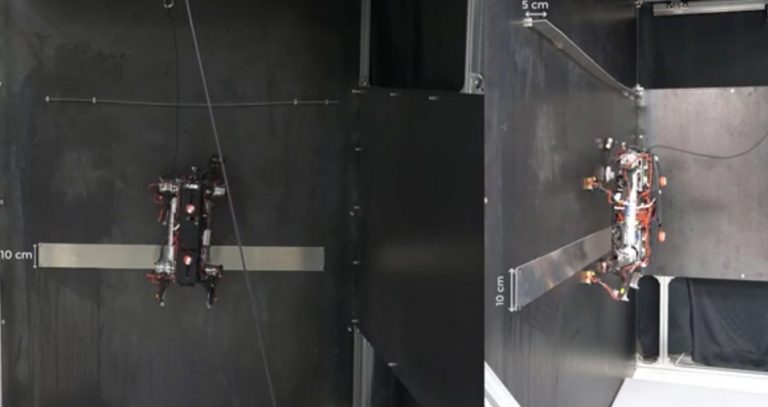
A gépet a kutatók nem csak a laboratóriumban, hanem a külvilágban, gyakorlatiasabb feladatok során is próbának vetették alá: egy régi, rozsdás tartály külső oldalán tesztelték, de a robot erre a kevésbé ideális alapra is fel tudott mászni gond nélkül. A teherbíró képessége legalább három kilogrammos a falon és a mennyezeten haladva, a sebessége pedig mászás közben 1-2 km/h-ás, ami nem sok, de a művelet közben nem a gyorsaság a lényeg, hanem a feladat pontos kivitelezése. A robot útja során át tud lépni kisebb-nagyobb akadályokon, például tíz centiméteres hézagokon is. Az egyetlen hátrányt a mágneses megtartáshoz szükséges feltételek jelentik, mivel emiatt csak fémből készült felületekre képes felmászni a gép.
A négylábú robotok egyre nagyobb szerepet kapnak az emberek munkáját segítő területeken: elvégzik az ellenőrzési, őrző-védő vagy megfigyelői munkákat, és már rendőrségi vagy biztonsági feladatokra is alkalmazzák őket. A képességeik bővítése még több lehetséges felhasználási módot nyit meg a jövőben, a falramászás például még nagyobb hatékonyságot ígér a gyári ellenőrzési folyamatok során.
(Fotó: KAIST)
Itt állíthatod be, hogy a Rakéta az elsők között legyen a Google keresőben