Az ausztrál Sunshine Coast Egyetem kutatói a jól bevált tudományos módszerhez, a biomimetikához fordultak új robotkonstrukciójuk megalkotásánál, vagyis az élővilágtól lestek el egy millió éves megoldást. Annyi más találmány után most a falra is felszaladó gyíkok mozgása volt az, amit megpróbáltak a technika eszköztárával reprodukálni.
Az X-4 nevű robot vezető fejlesztője, Johanna Schulz PhD-hallgató négy éven át vizsgálta, elemezte és számos prototípus-generáció építésével modellezte a gyíkok mozgását. A jelenlegi robotba beépített megfigyelési eredmények egyik legérdekesebbike a gyíkok lábtartásának meghatározott szöge. Az első lábak a haladási irányhoz képest jellemzően 20, a hátsók 100 fokos szögben állnak. Ezek az értékek meglepő módon azonosak a karmos lábakkal kapaszkodó gyíkfélék vagy a tapadós lábujjú gekkók esetében.
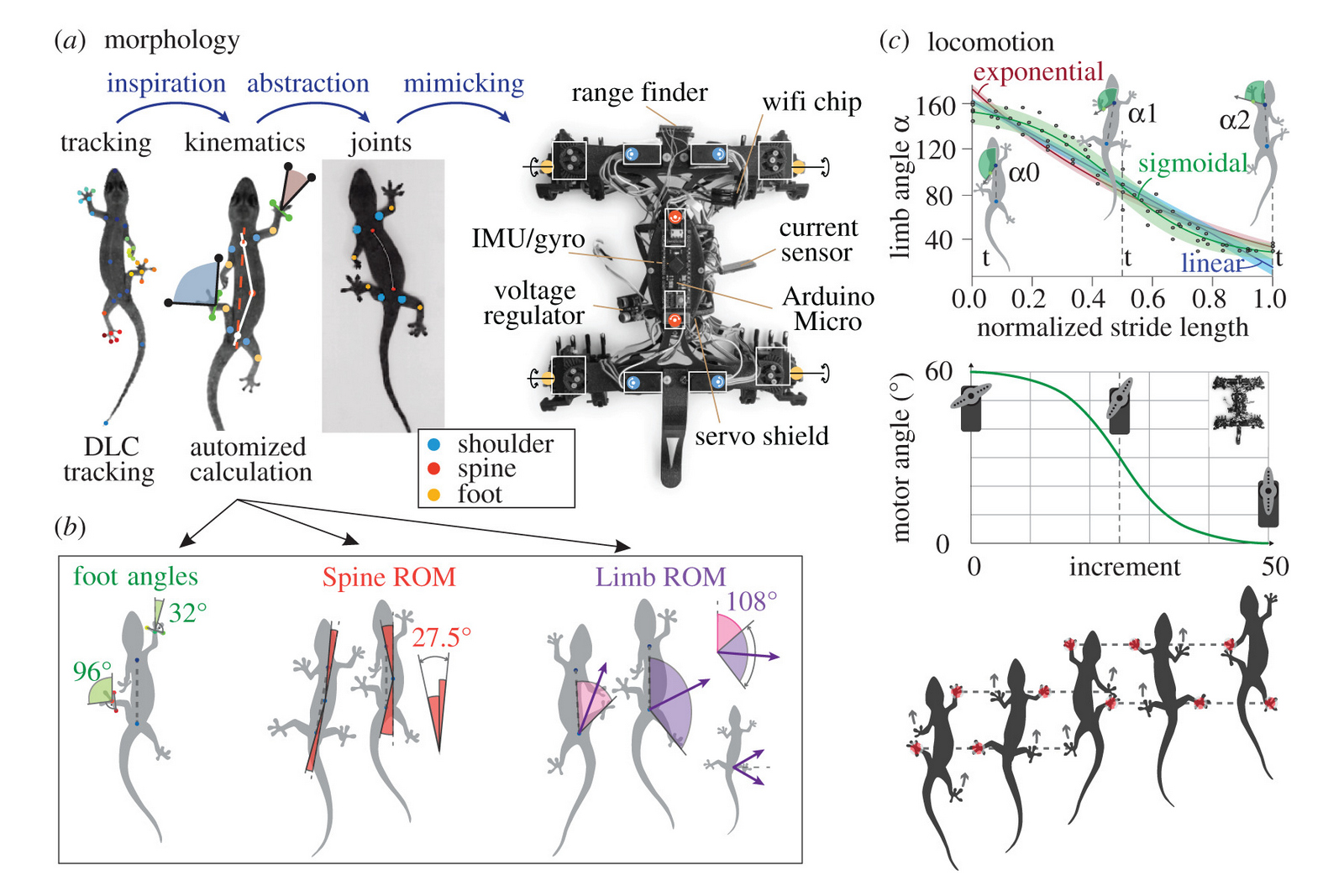
A kutatásban hosszasan elemezték a gyíkok mozgását; próbálták feltárni és leírni, milyen mozgásminták figyelhetők meg akkor, amikor a hüllők nagyon gyorsan illetve nagyon biztonságosan, stabilan haladnak. A kutatásvezető, dr. Christofer Clemente úgy látja, a gyíkok inspirálta alternatív mozgású robotok kiválóan használhatók lennének távoli műtárgyak automatizált vagy távirányított ellenőrzésére, kutató-mentő expedíciókban vagy akár más bolygókon. A marsi roverek például meglehetősen korlátozottan tudnak csak mozogni kerekeiken, míg egy lábakkal rendelkező, meredek felületekre is feljutó robot lehetőségeinek köre jóval tágabb lehetne.
A kutatók a robot fejlesztésének körülményeiről a The Royal Society Publishing tudományos publikációs fórumon számoltak be részletesen.