Az ISAAC-projekt – A jövőt jelentő asztrobotok már a Nemzetközi Űrállomáson szolgálnak
Ha robotok és világűr, akkor a popkultúra az inspiráció és párhuzamok feneketlen zsákjának bizonyul, ám ha mégis a világ leghíresebb asztrobotját – űrhajó karbantartására tervezett robotját kellene megneveznünk, a választás nem is eshetne másra, mint R2D2-ra a Star Warsból. A valóságos asztrobotok annyiban még emlékeztetnek is a globálisan ismert, csipogó masinára, hogy egyszerű formát kaptak – konkrétan lebegő kockákra kell gondolnunk, melyeken még két világító „szem” is található. A gép egyébként a maga letisztultságában annyira aranyos, hogy akár egy Pixar film főszerepét is rá oszthatnánk, és őszintén nehéz megérteni, hogy a NASA miért nem épít rá teljes „merchandising” vonalat.
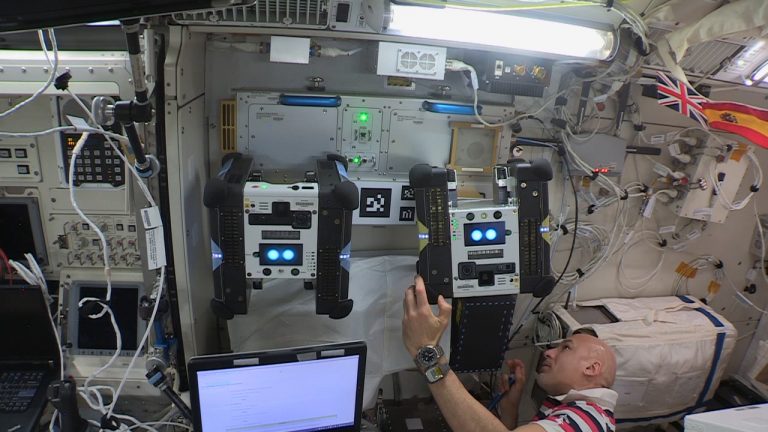
Túl a megjelenésen azonban okos szerkezetről van szó, amelyek a vezérlőszoftvert tekintve (talán nem véletlen ISAAC névvel látták ezt el) a későbbi – akár a Holdra, akár a Marsra tervezett – missziók alapját fogják adni. Sőt ez a szoftver fogja egyáltalán lehetővé tenni a Hold körül keringő Gateway űrállomás működését. Na de ismerjük meg először is magukat a masinákat! A három robot (neveik: Honey, Queen és Bumble) alakja tehát egy-egy kocka, melynek az éle 32 cm hosszú – a rendszert a NASA Ames Kutatási Központjában tervezték és építették. Először a robotok töltéséhez használt dokkoló állomást lőtték fel 2018-ban, majd ezt követte 2019-ben Bumble és Honey, legvégül pedig Queen érkezett meg ugyanazon év nyarán, és vele együtt az egységekre szerelhető három robotkar is.
A robotok elektromos forgólapátokkal hajtják magukat az állomás mikrogravitációs környezetében, a tájékozódásban pedig kamerák és szenzorok segítik őket. Az egységek azonban az említett karok segítségével az űrállomás korlátjait is meg tudják markolni, aminek köszönhetően energiát spórolhatnak, de a karral különböző tárgyakat is megragadhatnak. Az Astrobee rendszer egyébként az állomáson egy évtizeden keresztül szolgáló SPHERE (Synchronized Position Hold, Engage, Reorient, Experimental Satellite) robotok örökségét viszi tovább, illetve a SPHERE kapcsán szerzett tapasztalatokat ezen rendszer fejlesztésénél is felhasználták.
Az egységek képesek az önműködésre, de az űrhajósok vagy a földi irányítás akár távolról is kontrollálhatja őket. A robotok feladata jelenleg kettős: egyrészt segítik az asztronauták munkáját elsősorban a különböző rutinfeladatok kapcsán. Ez utóbbiak alatt olyasmit kell érteni, mint a leltározás, illetve az űrhajósok által végrehajtott kísérletek dokumentálása a robot kameráival, de ezek mellett még a rakományt is át tudják pakolni. Az Astrobee rendszer másik feladata, hogy kísérleti platformként funkcionál, ami jelen pillatban egy háromlépcsős tesztsorozatot takar, melynek első felvonásán vagyunk túl (erre mindjárt rá is térünk).
A robotok tehát már most is fontos munkát végeznek, de a szerepük (illetve az itt szerzett fejlesztési tapasztalatokat továbbvivő modelleké) egyenesen megkerülhetetlen lesz azon űrállomások, valamint űrhajók esetén, melyek hosszabb időn át lesznek kénytelenek emberi személyzet nélkül működni. Ezen eszközöket ugyanis épp az Astrobee-hez hasonló rendszerek tartják majd karban. Ilyen eszköz lesz például a NASA Hold körüli pályára tervezett űrállomása, a Lunar Gateway, amely fedélzetén valószínűleg nem szolgálhatnak egész éven át folyamatosan emberek, mint most a Nemzetközi Űrállomáson. A Gateway esetén elképzelhető, hogy az emberi legénység egy évből csak hat hetet lesz képes eltölteni a fedélzeten, a fennmaradó időben pedig az állomás körüli munkákat hasonló robotizált egységek látják majd el. Miként Trey Smith, az ISAAC-projekt vezetője fogalmazott:
„Az a hosszútávú víziónk, hogy ezek a gépek egy egész űrhajót lesznek képesek önműködő robotegységgé alakítani.”
Az ilyen ambiciózus álmokhoz mindenesetre idén tavasszal közelebb jutott a projekt, amikor is a három robot egyike, Bumble sikeresen vette a három állomásos tesztsorozat első lépcsőfokát. Mint az a fentebb linkelt videóból is kiderül, Bumble-nak az állomás működésének egy szimulált anomáliáját kellett elhárítania. A feladat során az állomás életbentartó rendszere magas koncentrációjú szén-dioxidot érzékelt – egy ehhez hasonló, valóságos helyzet egyébként komolyan veszélyeztetné az állomáson szolgáló hét fős legénységet. A robot ezután elnavigálta magát a kabin légáramlását biztosító, szellőzőnek kijelölt ponthoz, és számítógépes látással automatikusan beazonosította a szellőzőt eltömítő, idegen testet, ez esetben egy űrhajós „zokniját”, amit egy nyomtatott kép szimbolizált. Bumble ezután segítséget kért a tárgy eltávolításához.
Ezután Bumble a japán Bay 6 modulnak alkotta meg a nagy felbontású 3D-térképét az érzékelői segítségével. A feladat azonban nem volt olyan könnyű, mint amilyennek hangzik, mivel a robotnak lógó vezetékeken kellett magát átküzdenie, miközben időnként (a teszt részeként) a kommunikációja is megbénult. Bumble ugyan egy kevés segítséget kapott a földi irányítástól, de végül ezt a feladatot is sikeresen teljesítette.
Ezzel tehát lezárult a robotot irányító ISAAC (Integrated System for Autonomous and Adaptive Caretaking) szoftver első tesztje. A következő tesztben már több robot is részt fog venni, és a feladat a rakomány kipakolása lesz egy legénység nélküli űrhajóról egy (szimulált) legénység nélküli űrállomásra. A harmadik, utolsó felvonás során pedig az elsőnél is komolyabb vészhelyzetet szimulálnak majd: szivárog a kabinnyomás, tűz üt ki – a gépeknek pedig ezeket a vészhelyzeteket kell majd elhárítaniuk.
Az út az önműködő és önkarbantartó állomások felé nem csak ki van jelölve, de már az első, nem is olyan csecsemőlépések is megtörténtek rajta. Ahogy a már idézett Smith mondta:
„Minél messzebb megyünk az űrbe, annál okosabb űrhajókra és robotizált rendszerekre lesz szükségünk.”
(Kép: NASA, forrás: NASA_1, NASA_2, NASA_3, NASA_4)